Industriële productie is een belangrijke schakel in de bevordering van economische en sociale ontwikkeling. Momenteel wordt er steeds meer onderzoek gedaan naar automatische lasapparatuur, waardoor deze breed wordt toegepast bij de productie van diverse soorten lasconstructies.
Bij automatisch lassen is intelligente en digitale beheersing van de lasnaadafwijking tot op zekere hoogte noodzakelijk, op basis van de positieverschillen van het werkstuk, afwijkingen in de werkstuknaden en andere factoren. Daarom speelt laserlasnaadvolgtechnologie een belangrijke rol in het lasproces.
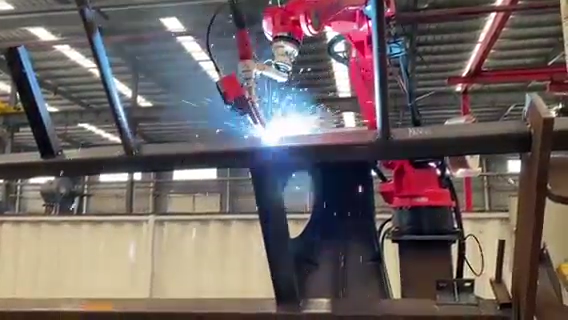
Cementtankwagenwagenbasis lassen Zeven-assige aardbaan acht-assige rotatie met laserlassen
-De positie van het werkstuk varieert sterk
-Er is sprake van een afwijking bij de werkstukaansluiting
-Een hoge lasnauwkeurigheid is vereist
-Slechte lasomgeving en rook
In dit geval wordt de intelligente robot HY1006A-145 van Yooheart gebruikt voor het lassen met een lasernaadvolgsysteem, dat een hoge flexibiliteit, stabiliteit en betrouwbaarheid biedt.
Vóór elke las scant en registreert de apparatuur eerst de coördinaten van de lasnaad via de lasnaadlokalisatie, berekent vervolgens de coördinatenoffset door het interne algoritme en zet de referentiecoördinaatparameters om in de werkelijke tijd om de werkelijke afwijking in de tijd te corrigeren, om zo de afdichting en integriteit van het product na het lassen te garanderen.
Methode van de "vierpuntskruising"
Zoals bekend bepalen twee punten een rechte lijn, maar de werkstukconstructie vormt een hoek. Het conventionele algoritme kan de positie hiervan niet bepalen. Hiervoor is de methode van "snijpunt" op vier uur nodig. Twee kruisende lijnen produceren een snijpunt. Het speciale algoritme berekent de positie van het snijpunt door de coördinaten van vier bekende punten te bepalen, om zo het lasdoel te bereiken.

Lasernaadvolgsysteem
Het lasernaadvolgsysteem bestaat voornamelijk uit lasersensoren en bewakingsterminals. De lasersensor wordt gebruikt voor actieve acquisitie en realtime verwerking van lasnaadinformatie en onderhoudt realtime communicatie met industriële robots. De bewakingsterminal bewaakt en configureert sensoren. Het systeem beschikt ook over functies voor lokalisatie, tracking en scanning vóór het lassen om te voldoen aan de behoeften van intelligent lassen.
Werkingsprincipe: Scannen van lasnaden, aanpassen van puntwolkbeelden, het algoritme identificeert nauwkeurig de kenmerkende punten en de realtime gegevens van de berekeningsresultaten worden naar de robot verzonden, omgezet in besturingsinstructies, om de werking van de robot aan te passen of te sturen.
Oplossing met gegolfde platen

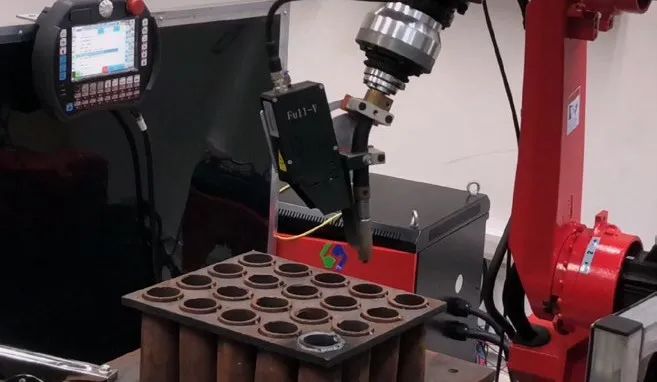
Automatische pluglasoplossing voor ronde gaten

Oplossing voor ronde naden

Buisplaatoplossingen
Yunhua Intelligent biedt snelle, veilige en efficiënte automatiseringsoplossingen en real-time systeemoplossingen. Het laser vision-naadvolgsysteem zorgt ervoor dat de lasrobot in real-time de lasnaad kan lokaliseren en volgen en het lastraject kan corrigeren op basis van de lasnaadoffset in het lasproces, om zo echt intelligent lassen te realiseren.
Plaatsingstijd: 09-04-2022



